

یکی از فضانوردان آژانس فضایی اروپا (ESA) که هم اکنون در ایستگاه فضایی بینالمللی اقامت دارد کنترل نمونه اولیه ماهنورد این آژانس فضایی موسوم به “آنالوگ-۱”(Analog-۱) را بر روی زمین به دست گرفت.
به گزارش ایسنا و به نقل از گیزمگ، “لوکا پارمیتانو” فضانورد آژانس فضایی اروپا(ESA) که در ایستگاه فضایی بینالمللی در مدار زمین در حال گردش است، هدایت نمونه اولیه یک ماه نورد جدید را بر روی زمین به عنوان بخشی از یک برنامه آزمایشی بر عهده گرفت.
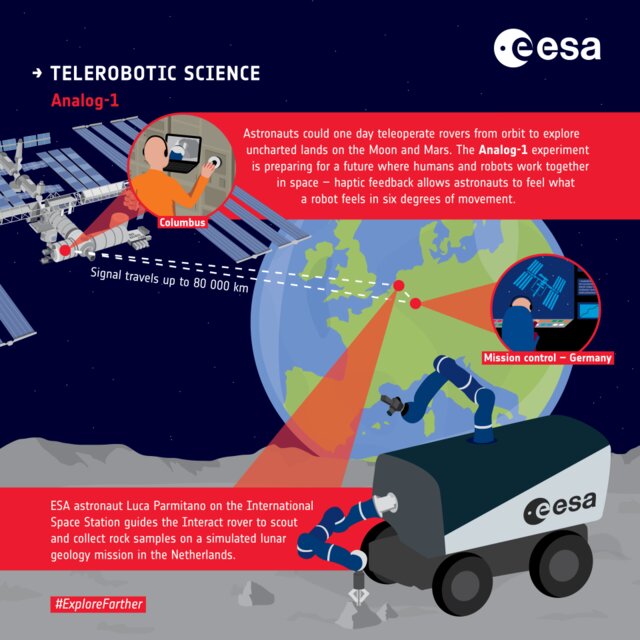
وی در تاریخ ۱۸ نوامبر ۲۰۱۹ از ایستگاه فضایی بینالمللی و در ارتفاع ۴۰۰ کیلومتری بالاتر از زمین هدایت ماه نورد “آنالوگ-۱” را برای یک گردش نیم ساعته در یک مسیر با چندین مانع در هلند به دست گرفت.
این یک آزمایش مقدماتی از سیستمهایی بود که روزی میتوان از آن برای اکتشاف از راه دور ماه و مریخ استفاده کرد.
با توجه به وضعیت فعلی این فناوری، برنامه ریزهای ماموریتهای ماه و ماموریتهای سیارهای فقط دو راهکار برای انتخاب دارند. راه اول اینکه فضانوردان را به سطح قمر یا سیاره مورد نظر بفرستند یا اینکه میتوانند کاوشگرهای رباتیک را به آنجا بفرستند. اما مشکل این است که هر دو رویکرد مزایا و معایب خاص خود را دارد. چرا که یک انسان بسیار باهوشتر و از نظر فیزیکی فعالتر و انعطاف پذیرتر از یک ربات است، اما ارسال فضانوردان به سطح ماه یا مریخ بسیار خطرناک و پرهزینه است. ضمن اینکه انجام فعالیت در یک لباس فضایی معادل غواصی در اعماق دریا است و مشکلاتی را به وجود میآورد.
از طرف دیگر، ارسال یک ربات بسیار ارزانتر و ایمنتر است، اما انجام کارهایی که یک انسان میتواند در عرض چند دقیقه انجام دهد، به وسیله ربات تا چند هفته طول میکشد.
 کاوشگر “آنالوگ-۱” یک راه حل خلاقانه برای حل کردن این معضل با ترکیب انسان و ربات است.
کاوشگر “آنالوگ-۱” یک راه حل خلاقانه برای حل کردن این معضل با ترکیب انسان و ربات است.
مأموریتهای ماه و فراتر از آن در حال حاضر باید تقریباً خودکار و خودران باشند، زیرا تأخیر زمانی برای کنترل از راه دور بسیار زیاد است. به عنوان مثال، رسیدن دستورات ارسالی به یک ماه نورد، یک و نیم ثانیه طول میکشد، در حالی که رسیدن دستورات ارسالی به مریخ چندین دقیقه طول میکشد که هدایت از راه دور را به عملی طولانی تبدیل میکند.
رویکردی که ESA در حال آزمایش آن است، ارسال یک کاوشگر رباتیک از یک فضاپیمای مدارگرد یا یک پایگاه در سطح قمر یا سیاره مورد نظر است که فضانوردان بتوانند از آنجا آن را با تاخیر تنها کسری از ثانیه مستقیماً کنترل کنند.
سیستم کنترل بر روی “آنالوگ-۱” برای کمک به این امر دارای یک دسته کنترل (joystick) با شش درجه آزادی حرکت است که بازخورد نیروها را نیز منتقل میکند. بنابراین هدایتگر انسانی مثلاً فشارهای وارده روی بازوی رباتیک را مستقیماً احساس میکند و می تواند فورا واکنش نشان دهد.
 “جسیکا گرنویلائو” مدیر پروژه “مترون”(Meteron) در گروه سیستمهای اکتشاف ESA گفت: آماده سازی یک فضانورد برای فعالیت حتی در ماه ساعتها طول میکشد. اما دادن امکان کنترل رباتها از نزدیک محل ماموریت به فضانوردان، هم ایمنی و آسایش را برای آنان فراهم میکند و هم نتایج بهتری در مدت زمان کمتری حاصل میشود. آزمایش ما نشان دهنده سازگاری عالی بین خدمه و سیستم رباتیک است و نشان داد که این کار ترکیبی در طیف گستردهای از کارها بهتر عمل میکند.
“جسیکا گرنویلائو” مدیر پروژه “مترون”(Meteron) در گروه سیستمهای اکتشاف ESA گفت: آماده سازی یک فضانورد برای فعالیت حتی در ماه ساعتها طول میکشد. اما دادن امکان کنترل رباتها از نزدیک محل ماموریت به فضانوردان، هم ایمنی و آسایش را برای آنان فراهم میکند و هم نتایج بهتری در مدت زمان کمتری حاصل میشود. آزمایش ما نشان دهنده سازگاری عالی بین خدمه و سیستم رباتیک است و نشان داد که این کار ترکیبی در طیف گستردهای از کارها بهتر عمل میکند.
این آزمون اولیه آزمایش یک فهرست از حرکتهای ساده و فعالیتهای ابتدایی نقشه برداری بود، اما آزمایش کامل آن برای امروز (دوشنبه ۲۵ نوامبر) تعیین شده است.
منبع: ایسنا